School of Engineering
Aerospace Engineering
 Vision
Vision
Working at the heart of the UK aerospace eco-system, the Aerospace group provides transformative advances in aeronautics and space technology for the 21st century.
The group integrates fundamental advances across specific disciplines to deliver new architectures for affordable, sustainable, and innovative air transport and space operations.
Scholarly academic leadership, complementary discipline expertise, powerful software, and the School numerical and experimental facilities grow hand in glove to deliver aerospace industry transformative advances.
Strategy and strands
The Aerospace research group brings together the School of Engineering disciplines in the aeronautical and space research themes of:
- Autonomous air vehicles
- Electrically powered aircraft
- Green propulsion
- Laminar-turbulent flow control
- Silent flight
- Satellite technology
Research projects
The group is keen to lead or take part in collaborative research projects and consortia. Informal discussions can be initiated with either the Head of Group or any of the group members directly.
New Investigator Award EPSRC - Determining the Effects of Competing Instabilities in Complex Rotating Boundary Layers
Principal Investigator
Dr Zahir Hussain, BA, MA (Cantab), PhD, MRAeS, FHEA, Lecturer in Fluid Dynamics, National Lead of the Boundary Layers and Complex Rotating Flows UKFN SIG
Project work packages
- WP1: Neutral stability analyses for complex geometries
- WP2: Energy analyses and flow dissipation
- WP3: Competing effects of crossflow and centrifugal instabilities
Main results
- Chebyshev Spectral Solver (CheSS)
- Competing Boundary Layer Instabilities
- Complex 3D geometry neutral stability curves
AeroTraNet2 - FP7 Aeronautical Training Network
European Coordinator
Aldo Rona, BEng, PhD, SFHEA, Associate Professor, Head of Group
- ar45@leicester.ac.uk
- +44 (0)116 252 2510
Project work packages
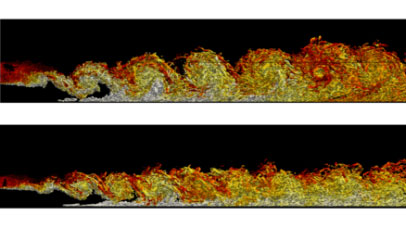
- WP1: Leicester: CFD of jets with strong shock-associated noise
- WP2: Cerfacs: LES of dual-flux coaxial jets
- WP3: UNIROMA TRE: Wavelets and velocity-pressure analysis methods
- WP4: VKI: Dual flux jet experiments
- WP5: IMFT: Jet shear layer instability and ad joint techniques
- WP6: GE Power: Knowledge management and uncertainty quantification
- WP7: INSEAN: Pressure-velocity coupling experiments
- WP8: Airbus France: Cross-read with flight test data
- WP9: U. Greenwich: Reduced order parametrized models
Main results
- 9PhD's
- ANTARES noise extractor
- Shock-associated noise
- Knowledge capturing GE tool
- Dual stream jet receptivity map
Autonomous decision making - autonomous air traffic control
Lead
Xuefang Wang, BSc, PhD, FHEA, Lecture in Control Engineering
- xw259@leicester.ac.uk
- +44 (0)116 252 3546
Project work packages
- WP1: Decision making for autonomous vehicles
- WP3: Drone landing - conflicts between objective and safety
- WP4: Safety-critical cooperative control algorithms design
Main results
- Between 07/2021 - 09/2023
- Publications/workshops
- Intelligent algorithms designed based on AI and machine learning can dynamically manage low-altitude air traffic
- Drones and other aerial vehicles can operate autonomously with the help of onboard AI systems
- Hierarchical high-level decision-making framework (Future air mobility systems: High-level decision making + Path planner + Low-level control).
EPSRC - At the limits of adaptive systems: constrained adaptive control
Co-Investigator
Emmanuel Prempain, PhD, Associate Professor in Control
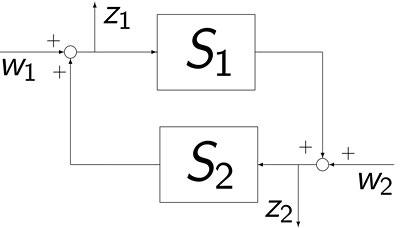
Adaptive control systems are able to adapt themselves to changes by using algorithms which update their parameters; simply put, they are self-tuning controllers.
This is a very appealing feature and, in principle, allows a controller to evolve in order to enhance its performance or to increase its tolerance to uncertainties.
In some niche aerospace applications, adaptive controllers have proven to be very successful.
At the same time all control systems have limits on the "input" they apply to a system. If these limits are not accounted for properly in controller design, they can cause the system performance to degrade and may even drive it to instability.
This research was the first to address the gap in handling input constraints for adaptive control systems.
Tailplane stall study - Electrically powered aircraft, autonomous air vehicles
Nadjim Horri, MEng, PhD, FHEA, Lecturer in Aerospace Control
Project work packages
- WP1 – Static stability analysis and derivation of the tail efficiency factors, M. Bromfield (Now Birmingham University), PI.
- WP2 - Flight dynamics and simulation analysis for different tail efficiency factors, N. Horri, CoI.
Main results
- Between 03/2019 and 03/2021
- Coventry University and AIBN
EPSRC Mathematical Sciences Small Grant - Resolvent analysis for strongly stratified flows
Principal Investigator
Benjamin Bugeat, PhD, Lecturer bb283@le.ac.uk
Project dates: 1 October 2025 – 30 September 2026
Work packages
- WP1. Derivation of a resolvent framework in the low-Mach approximation (M<<1) for arbitrary equations of states.
- WP2. Develop a pseudo-spectral solver coupled with singular value decomposition of the resolvent matrix (SVD).
- WP3. Obtain a map of the optimal gain across different frequency and wave numbers, identifying the largest energy growths and their associated physical mechanism.
Expected outcomes
- New insights into the transition to turbulence of strongly stratified flows.
- New understanding regarding the dynamics of supercritical fluids - used in rocket engines and energy systems - that can inform new strategies to trigger turbulence, enhancing mixing and heat transfer.
- Resolvent-based model of turbulent coherent structures in these flows.
EPSRC project AAReST autonomous assembly of a reconfigurable space telescope using 3U nanosatellites
Control lead in EPSRC/AAReST
Nadjim Horri, MEng, PhD, FHEA, Lecturer in Aerospace Control
Project work packages
- Navigation and control of the mobile robotic nanosatellite simulators.
- Electromagnetic docking between two nanosatellites
- Relative motion estimation using Kinect based visual navigation
- Air bearing table facility development
- 3U nanosatellite demonstrators development
Main result
- Project has run between 09/2011 and 03/2012
- University of Surrey led
- Led the control work packages (autonomous driving, path following, MPC, mode switching control based on Sensors availability)
Forward motion compensation to enhance imaging quality for the CO2Sat mission
Co-Investigator
Nadjim Horri, MEng, PhD, FHEA, Lecturer in Aerospace Control
Task:
Delivered the fine pointing attitude and orbit control system (AOCS) forward motion compensation (FMC) investigation to enhance imaging quality for the UKSA project (University of Leicester), which was entitled:
CO2Sat:
Miniaturised rapid deployment high resolution carbon mapping sensors for monitoring Green House Gas (GHG) emission management programmes in the Gulf region-phase 2.
Task duration: November 2024 to end of March 2025
Project dates: April 2024-March 2025
Additionally, members of the Aerospace Engineering group also participate in projects and research within the Green Energy Technologies and Systems group, such as:
- ERA – Hydex, Energy Research Accelerator, University of Leicester Lead.
- EPSRC-DTP programme, Project 2438289 (2020-2024).
- Hi-Scale: From Materials to Devices - European Cooperation in Science and Technology, COST Action project CA19108. WG1 lead.
- EPSRC Superfem, Project No. EP/S025707/1. Superconducting Ferromagnetic Metamaterials Enabling the Development of Resilient High Voltage/High Current Transmission Systems (SuperFem).
- Solar Boost British Council Newton Fund, Project No. 413871894. Boosting solar energy capacity of Indonesia without compromising protected areas: an integrated GIS tailoring solar energy resource and local information.
Academic staff
Head of Group
Lecturers and Associate Professors
- Dr Adam Joesbury
- Dr Audrius Bagdanavicius
- Dr Benjamin Bugeat
- Dr Ali Haghiri
- Dr Nadjim Horri
- Dr Zahir Hussain
- Dr Khaled Laib
- Dr Emmanuel Prempain (Associate Professor)
- Dr Bo Tian
- Dr Amadi Udu
- Dr Xuefang Wang
Affiliates
- Dr Essam Abo-Serie
- Dr Daniel Burton
- Dr Yuan Gao
- Dr Bing Ji
- Dr Harold Ruiz (Associate Professor)
- Dr Jinning Zhang
Honorary and Emeritus
- Emeritus Professor Mike Warrington
- Emeritus Professor Christopher L Morfey
- Honorary Professor Hongbiao Dong
- Honorary Professor Antonio F. Corno
- Honorary Fellow Dr David Adebayo
- Honorary Fellow Dr Hakim Kadhim
PhD applications
The group welcomes students to study for PhD degrees in any of its research areas. Informal discussion can be made with either the Head of Group or any of the Aerospace engineering group members directly. Details of potential research topics can be found in the websites of Aerospace engineering group members.
Learn more and apply for a Research degree in Engineering.
Computational and Experimental Facilities
The Group’s aerospace research combines analytical, experimental, and computational approaches, supported by the Mechanical Workshop, the Electrical Workshop, and Technical Services staff. Research facilities include:
- An 800 psi compressed air system, and associated 8 m3 storage system rated at 600 psi.
- The Charles Wilson wind tunnel, a low turbulence intensity closed loop tunnel with an aerodynamic test section, and an environmental test section.
- The integrated energy storage testing and verification laboratory, with 67kWh battery storage (30 kW rated) and 33 kWh supercapacitors (15 kW rated)
Commercial CFD packages including ANSYS FLUENT, and Star-CCM+ are available for industrially-relevant work. Open-source packages including OpenFOAM, and bespoke academic codes are used for academic research.
The Group uses the University of Leicester Tier 3 Research Computing cluster, the Tier 2 CPU-GPU regional cluster SULIS, funded by the UKRI World Class Laboratories Fund and the HPC Midlands Plus consortium, and the UK national supercomputing service.